How to configure the controller for a motor?
If you want help with the motor identification, or you are not sure if the sensor is properly identified, please follow these steps:
- Make sure that the motor shaft is unloaded, and the motor is mounted safely on a test bench.
- Make sure that the motor phases and rotor position sensor (if selected) are connected properly to the controller.
- Connect a battery (or a 2-quadrant PSU) and turn on the controller (according to it's powering variant).
- Install the SWTools and connect the controller to your PC (with one of its interfaces).
- Open the siliTune tool according to its manual.
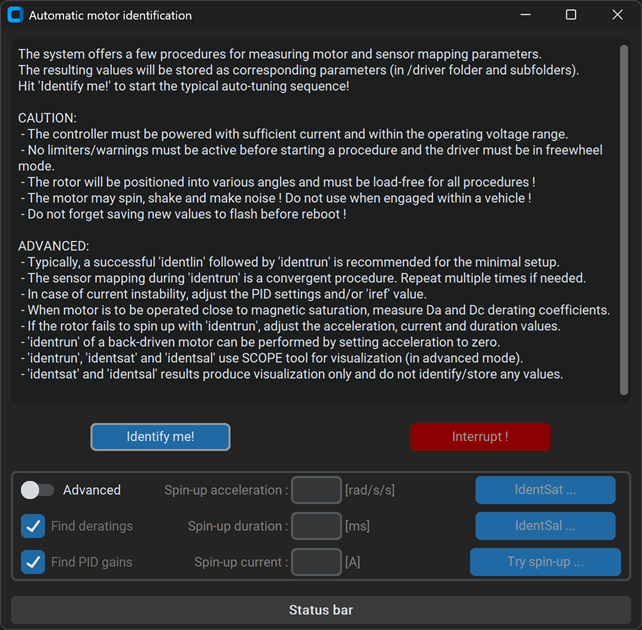
- Fill-in the form:
- Select your motor sensor type: choose in
init asdropdown menu. Wait for the confirmation message box. - Set appropriate phase current for your motor:
irefbox. - Set the motor pole pair count of your motor:
ppbox. This is required for correct speed/ODO measurements only.
- Select your motor sensor type: choose in
- Click on Automatic identification button and follow the guidelines there.
- Evaluate the motor drive and if satisfied, save the parameters using the button in siliTune.
tip
For a more information, please check this detailed guide.
- The described procedure works only for an PMSM motor. For other motor types, please check respective guides or contact us.
- The rotation direction of spin-up during
identrunshould be your desired forward direction. If not, please swap any of the two motor phases and repeat. - For assistance, send us all information about your current setup + the current configuration: how to export parameters. Our support will examine the data and help you with the motor identification.