CAN Message Protocol
Documentation covering LYNX-specific CAN messages. For other message types, please refer to the driver documentation.
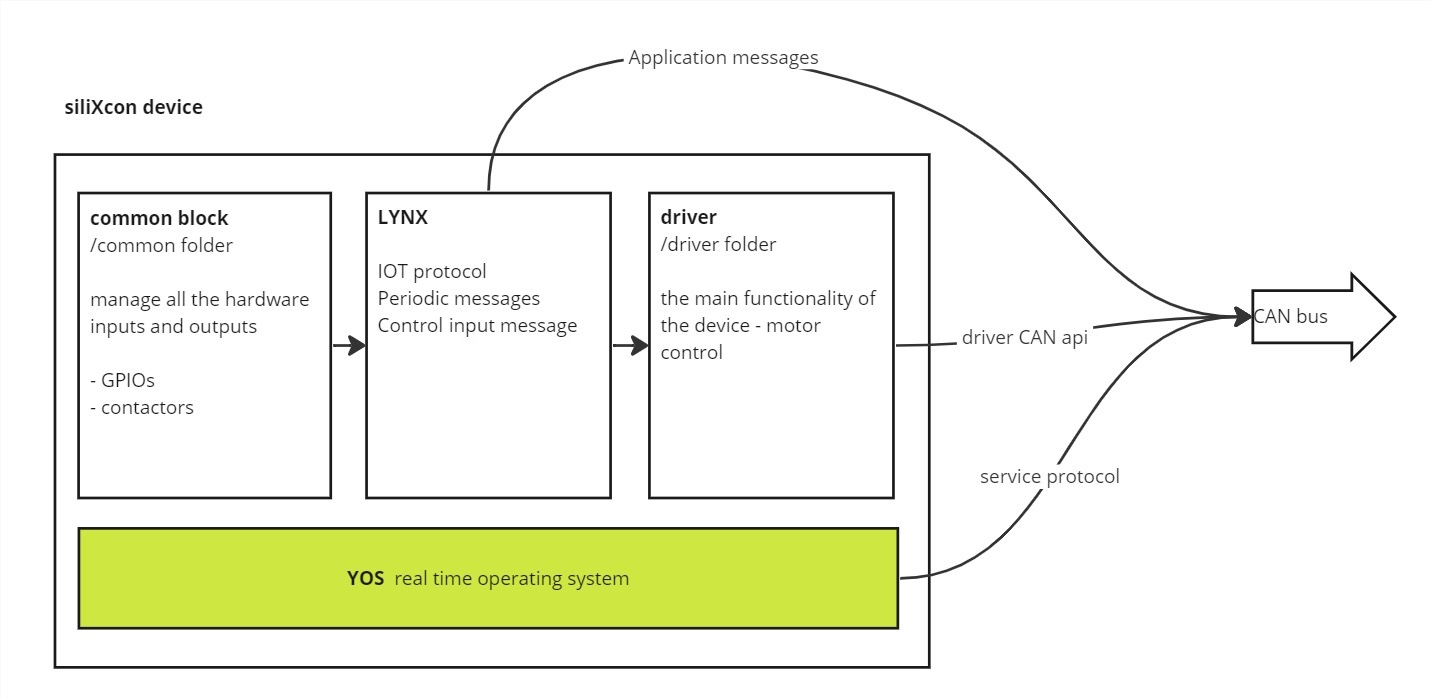
Periodic Messages
Messages automatically transmitted by LYNX application after controller initialization.
info
Note: Messages are not transmitted if device address is not 0
Control Input Messages
Protocol for sending control inputs to LYNX via CAN:
- Accelerator control
- Brake signals
- Map switching
- Other inputs
Commonly used when GPIO pins are insufficient.
IOT Protocol
Interface for reading and writing LYNX parameters over CAN bus.