Braking Systems
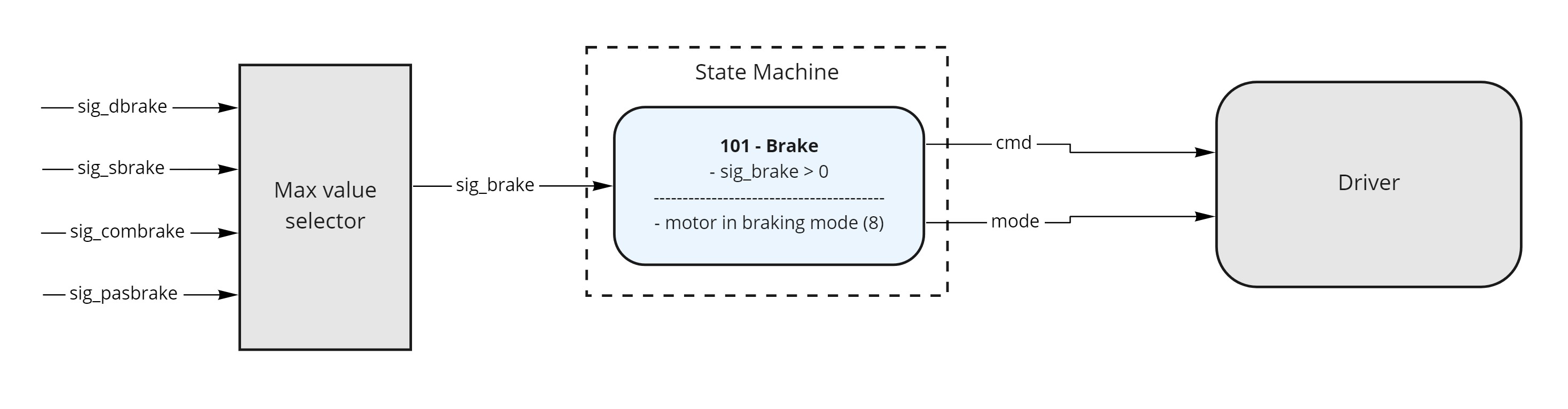
Lynx implements four independent braking sources, each configurable through dedicated parameters. The highest braking value is forwarded to the driver block as cmd (driver mode 8). Signal flow diagram below shows braking system overview, with detailed descriptions in subsequent chapters.
Brake Signal Monitoring
| Variable | Description | Range |
|---|---|---|
/sig_brake | Final brake output after max selection | [0-1] |
/brake/sig_combrake | Accelerator brake level | [0-1] |
/brake/sig_dbrake | Dynamic brake level | [0-1] |
/brake/sig_pasbrake | Negative cadence brake level | [0-1] |
/brake/sig_sbrake | Static brake level | [0-1] |
Memory-optimized builds may exclude monitoring signals while maintaining functionality. /sig_brake remains always available.
Brake Current Configuration
Set braking current reference via /driver/irefr. If set to 0, system uses /driver/iref as reference.
For detailed configuration, see Driver Settings - References.
Current Limitations
Braking force limits:
/driver/limiter/ibneg: Maximum battery regenerative current/driver/limiter/pneg: Maximum battery regenerative power/driver/limiter/eblimit: BMS-imposed limitations
Details in Driver Settings - Limiters.
Map-Based Brake Control
Brake input overrides accelerator by default. Configure brake behavior per map using options parameter.
| Option Value | Function |
|---|---|
| 1 | Disable static brake |
| 2 | Disable dynamic brake |
| 3 | Disable both static and dynamic brake |
| ... | Additional options |
Note: Bitwise parameter
Configure options in /maps/mapX for map-specific brake behavior.