Static Braking System
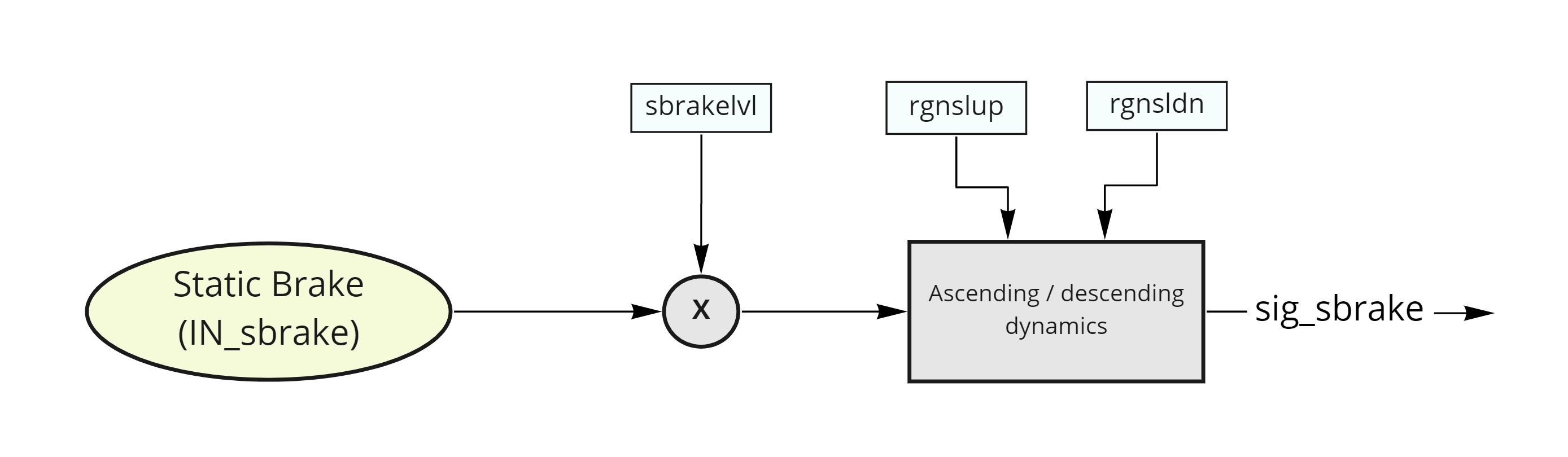
Static brake uses simple on/off input, typically a push button. Input signal (0/1) multiplies with sbrakelvl parameter to set maximum brake force. Parameters rgnslup and rgnsldn control braking signal ramp rates.
Setup Process
Input Configuration
Configure static brake input pin via /io/IN_sbrake parameter using GDIN ID.
Available inputs:
| ID | Input |
|---|---|
| 16 | GDIN0 |
| 17 | GDIN1 |
| 18 | GDIN2 |
| 19 | GDIN3 |
| 20 | GDIN4 |
| 32 | DIN1 |
| 33 | DIN2 |
| ... | ... |
| 39 | DIN8 |
See Input mapping for details.
Consider enabling pull-up resistor. GPIO configuration guide
Braking Force Configuration
Brake activation sends sbrakelvl command to the driver, using /driver/irefr as phase current reference (mode 8). Current reference details
Configure sbrakelvl in map folders (/maps/mapX) for map-specific brake force. Map documentation
Zero sbrakelvl disables braking but maintains accelerator override. Disable static brake via map options parameter. Options details
Response Tuning
Adjust brake attack/release rates using:
/brake/rgnslup: Attack rate/brake/rgnsldn: Release rate
Parameters use LPF values. LPF documentation
Monitor:
- Current brake level state:
/brake/sig_sbrake - Active brake level setting:
/brake/sbrakelvl
Other Options
Default: Static brake disarms system
Modify using drvopts parameter:
- Set bit 1 to disable brake-triggered disarm Parameter details