Accelerator-Based Braking
Enables brake control through accelerator input, dividing accelerator range between braking and acceleration functions.
The term 'throttle' originates from gas/combustion engines, where it refers to a control element for acceleration. As we transition to electric vehicles, we prefer the term 'accelerator'. Both terms can be used interchangeably as synonyms.
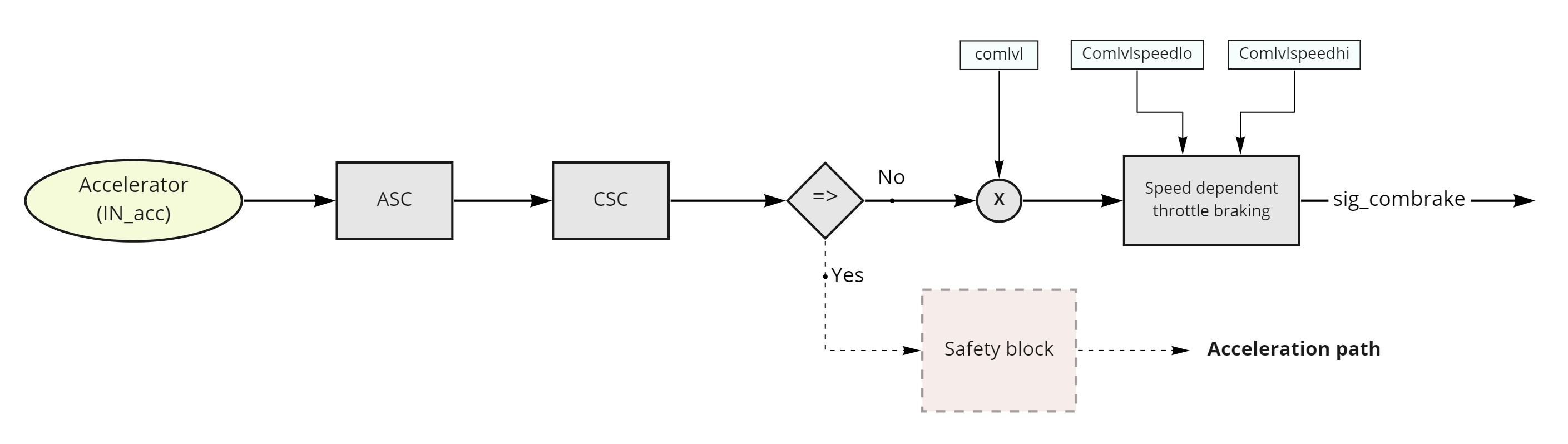
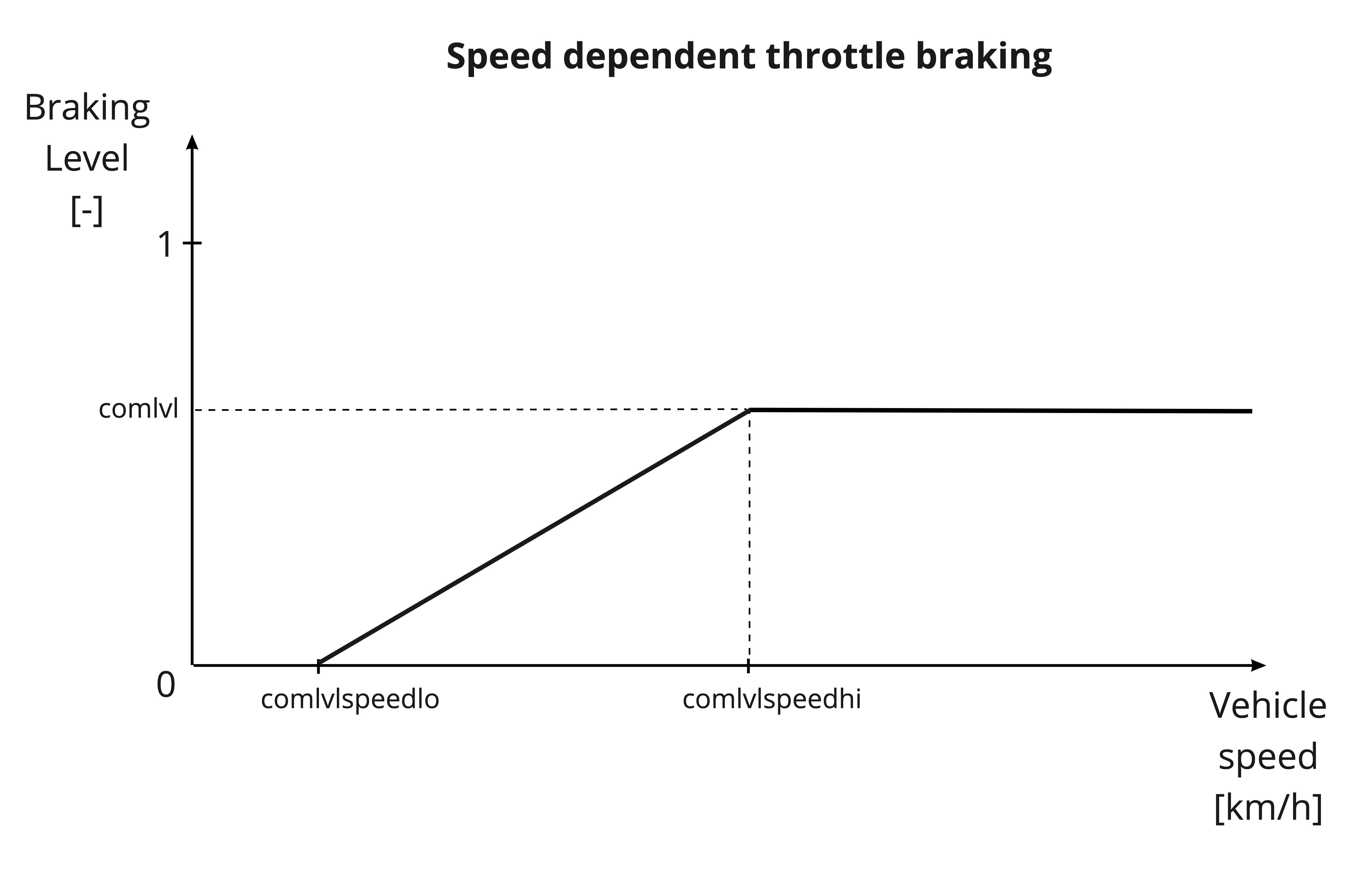
Accelerator linked ASC generates negative output on release, processed through dedicated path with comlvl multiplier and speed-dependent control. Speed thresholds comlvlspeedlo and comlvlspeedhi define activation range, with linear force scaling between levels. Requires drvopts configuration to enable comlvl feature.
Setup Process
Feature Activation
Set drvopts to 2
drvopts uses bitwise configuration. Parameter details
Without comlvl feature, negative accelerator triggers reverse mode
Accelerator Range Configuration
- Configure
/acc/ascparameters:- Set min/max signal values
- Set
centerto define brake/acceleration transition point
- Set
/acc/cscparameter:ldz= 0 to eliminate brake/acceleration gap
Brake Force Setup
Brake activation applies comlvl to driver, using /driver/irefr as phase current reference. Current reference details
Configure comlvl in map folders (/maps/mapX) for map-specific brake force. Map documentation
Monitor:
- Accelerator brake level:
/brake/sig_combrake - Active comlvl state:
/brake/comlvl
Speed-Dependent Control
Configure activation range using:
/brake/comlvlspeedlo: Minimum speed threshold/brake/comlvlspeedhi: Maximum speed threshold
Requires proper speed measurement configuration. Speed measurement guide