Kickback scooter helper
This feature will extend your travel distance on a kickback scooter.
How it works
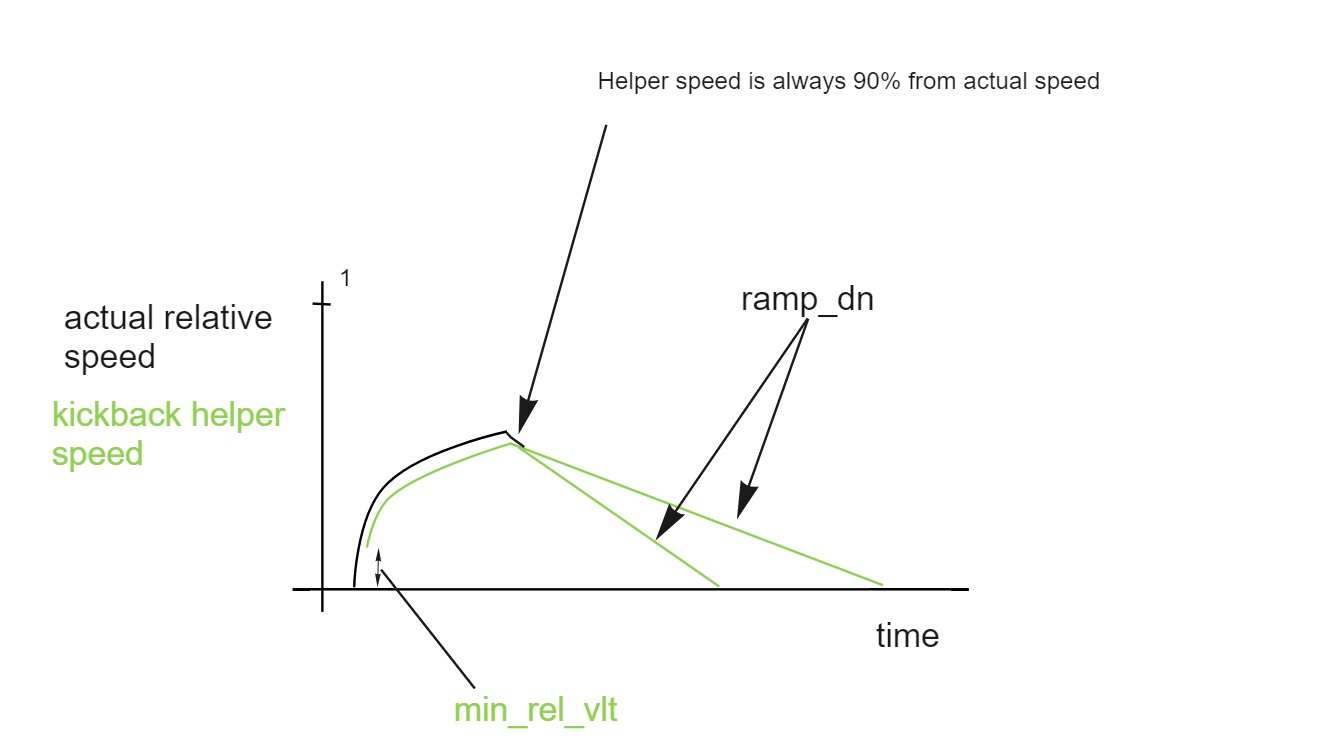
If you push the scooter, the controller will slowly ramp down from your speed (emulating an inertia).
Safety notes
Do not use this feature without the static or dynamic brake function enabled. Without the brake input, you may not be able to stop the vehicle.
Parameters
All parameters are located in /kickback folder.
| Name | value | description |
|---|---|---|
ramp_dn | How fast your vehicle slows down in helper mode. | |
min_rel_vlt | 0 - 1 | Minimal relative speed to enable kickback mode. |
trqlvl | 0 - 1 | Torque value for help. |