User Map System
Maps provide selectable drivetrain configurations for different riding conditions. When activated, a map's parameters set driver limits as shown below:
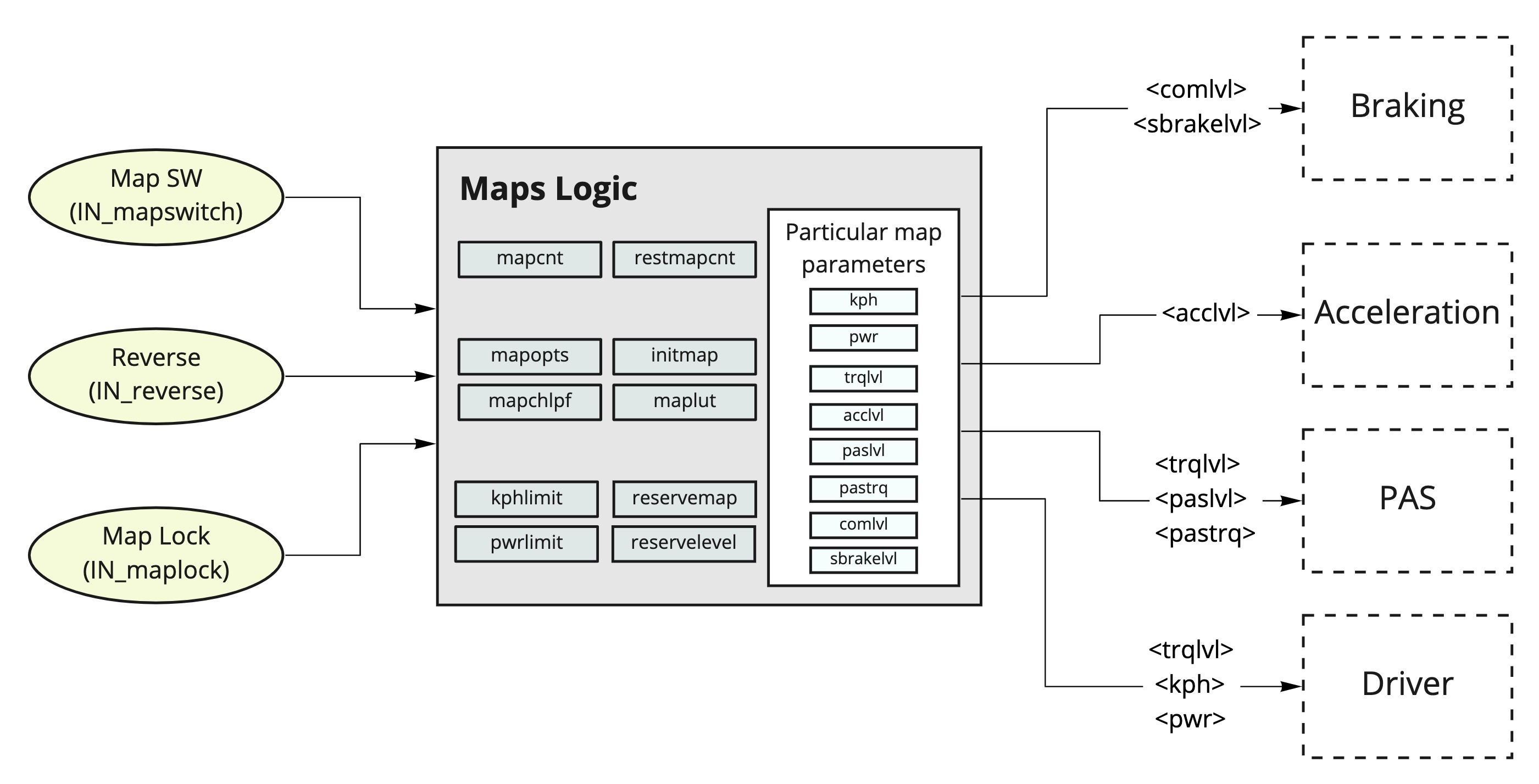
Configuration Parameters
Global Parameters:
| Parameter | Function |
|---|---|
mapcnt | Total user maps |
restmapcnt | Restricted user maps |
initmap | Startup map selection (-1 = restore last) |
maplut | Level-based map switching |
mapchlpf | Limit transition control: - Positive: LPF - Negative: Ramp |
kphlimit | Speed limit (kph) |
pwrlimit | Power limit (W) |
Map Options
Global Limits
kphlimit and pwrlimit override higher map settings.
Used for CAN 0x626 relative values.
Map Categories
-
Safety Map (map0)
- Default startup map
- Prevents operation until map change
- Only accessible at startup
- Optional: Set different
initmap
-
Normal Maps
- Standard operating maps
- Unrestricted cycling
-
Restricted Maps
- Requires active
in_maplock - Transition behavior set by
mapopts
- Requires active
-
Reverse Map
- Activates with
in_reverse - Enables reverse/boost modes
- Triggers disarm on entry
- Activates with
-
Reserve Map
- Activates below
reservelevelbattery threshold - Single activation per ride
- Uses map specified by
reservemap
- Activates below