Accelerator System
Disambiguation
The term 'throttle' originates from gas/combustion engines, where it refers to a control element for acceleration. As we transition to electric vehicles, we prefer the term 'accelerator'. Both terms can be used interchangeably as synonyms.
tip
Review these concepts first:
warning
Disable motor power before accelerator configuration to prevent unexpected motor activation.
Use stop command to disable motor until next power cycle.
Acceleration Control
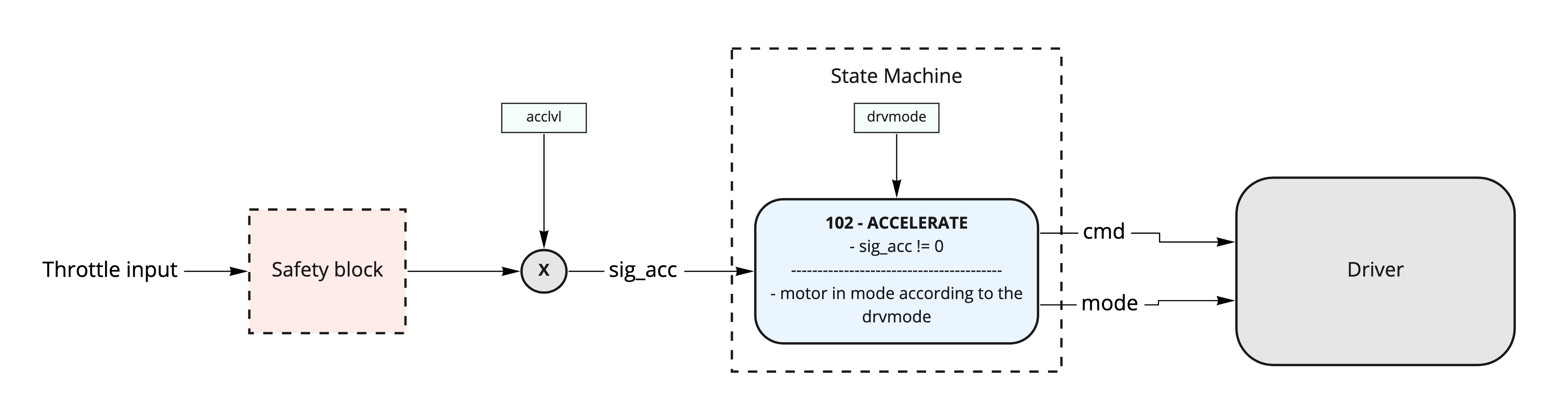
Signal flow:
- Accelerator input passes through safety block (device arming control)
- Signal multiplied by acclvl parameter (maximum acceleration limit)
- Resulting signal (
sig_acc) feeds into state machine - Driver receives
sig_accas command - drvmode parameter determines motor control method
Advanced features available:
- Accelerator/brake fusion
- Electronic clutch
- Selectable motor modes
tip
Start with Basic accelerator configuration using a single accelerator input before implementing advanced features.
System States
sig_acc [-1 to 1]
Normalized acceleration command signal used by driver.
Configuration Parameters
acclvl [0 to 1]
Map-specific accelerator scaling parameter. User map details.
Current value displayed in /acc/acclvl state.