Accelerator & Brake Fusion
The term 'throttle' originates from gas/combustion engines, where it refers to a control element for acceleration. As we transition to electric vehicles, we prefer the term 'accelerator'. Both terms can be used interchangeably as synonyms.
Configure accelerator and brake signal behavior using drvopts parameter.
Requires configured accelerator and brake signals with ASC and CSC blocks.
| Value | Bit | Function |
|---|---|---|
| 4 | 2 | Enable accelerator-brake signal combination |
| 8 | 3 | Disable reverse in accelerator-brake fusion |
| - | - | Other bits documented separately |
drvoptsuses bitwise configuration. This document covers bits 2 and 3 only.
Standard Operation
Default setting (bits 0): Accelerator signal passes directly to driver. Brake signal, when active, triggers motor braking regardless of accelerator position.
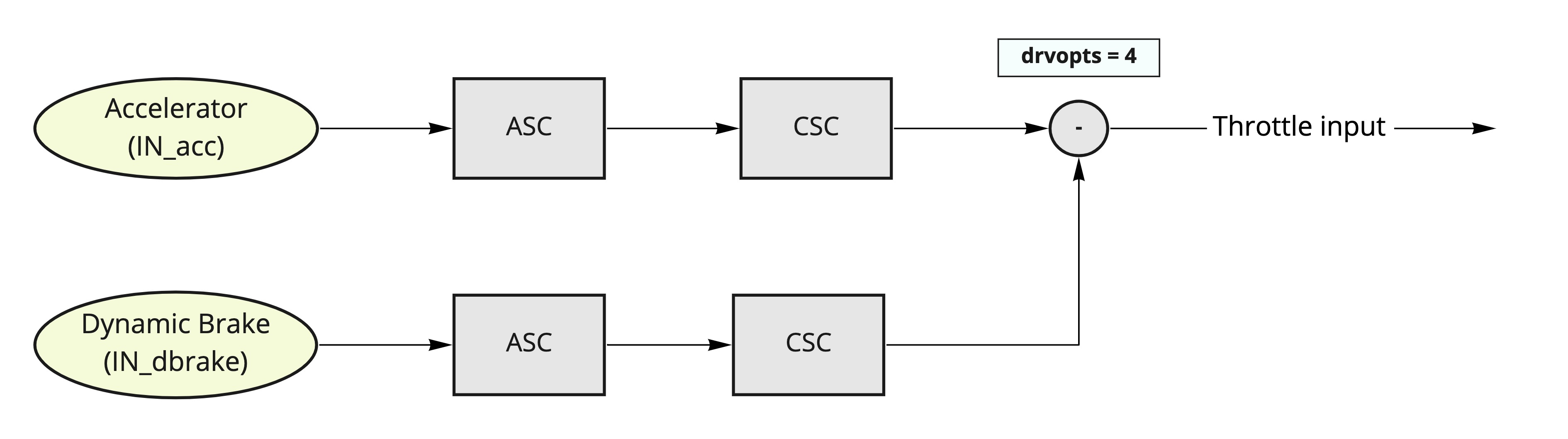
Dynamic Brake Reverse
Subtracts brake signal (post-CSC) from accelerator signal (post-CSC). Negative result enables reverse rotation. Enables instant direction changes - useful for dual-pedal systems like forklifts. Equal pedal pressure cancels signals, stopping motor.
Enable: Set
drvoptsto 4
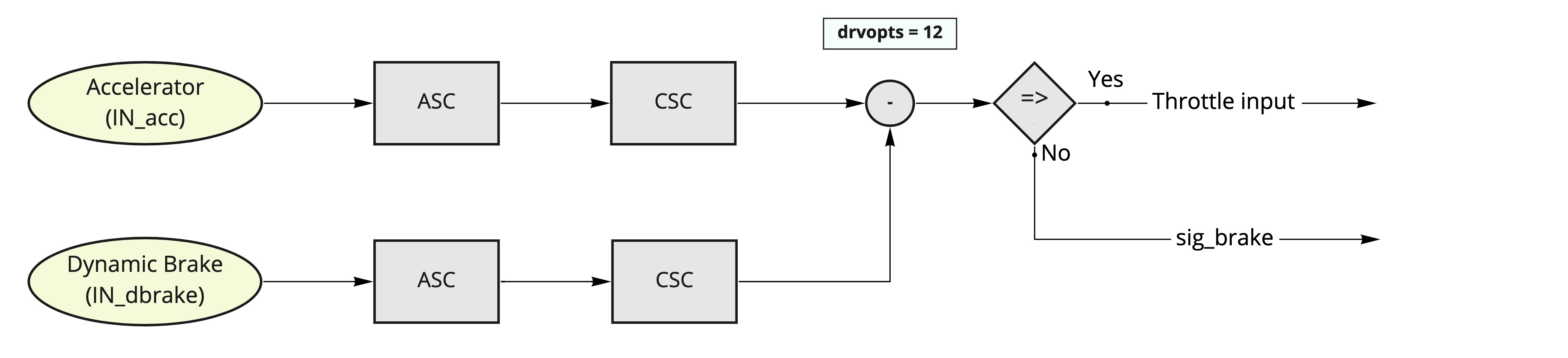
Accelerator-Brake Integration
Similar signal path to Dynamic Brake Reverse. Negative results trigger proportional braking instead of reverse. Functions like clutch system but applies braking force below zero.
Enable: Set
drvoptsto 12 (4+8)
Differs from clutch input:
- Clutch: Full clutch = freewheeling, regardless of accelerator
- Fusion: Full brake = maximum braking force
Accelerator-Based Reverse
Enables single-pedal forward/reverse control. Splits accelerator range into forward and reverse zones.
Configuration:
- Set
centerin accelerator linked ASC to define neutral point - Above center = forward, below = reverse
- Use CSC
ldzfor neutral zone width
Incompatible with:
- Accelerator-brake fusion
- Dynamic brake reverse
- Accelerator brake (comlvl)