IV. Map Configuration
LYNX enables dynamic adjustment of torque, power, and speed limits through power maps.
Map Switch Setup
Default configuration has no map switch assignment. To assign GPIO1 as the map switch button:
- Set
/io/IN_mapswitchto 17 (refer to the Common IO manual) - Enable GPIO1 pull-up resistor: set
/common/ioconfto 1 (refer to the Common IO manual)
Motor sound feedback indicates map changes - beep count matches map number.
VDS-display users can utilize the display's map switch through LYNX-front application. Ensure proper CAN bus communication.
Vehicle Speed Configuration
Speed calculation requires:
- Motor pole pair count (from previous setup)
/gearthrparameter: motor-to-wheel revolution ratio (how many motor shaft revolutions per single wheel revolution)/odothrparameter: wheel revolutions per kilometer
Correct configuration enables speed limiting in km/h.
Monitor speed in /speed state variable.
Speed Limiter Tuning
Within limiter setting, you can find critical parameters to prevent oscillation or slow response. Recommended starting values:
"/driver/limiter/rdec" : "100.0" # '[RPM] speed limiter decrement rate'
"/driver/limiter/rgain" : "50.0" # 'speed limiter gain'
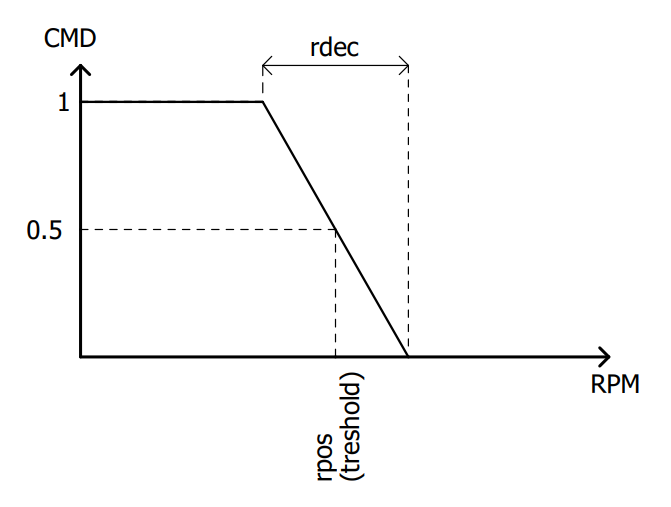
Map speed limit (kph) determines rpos threshold. In LYNX application, this parameter is marked as volatile.
Units:
rpos,rdec: motor [RPM]- Map
kph: vehicle [km/h]
Number of maps
Default: three maps. Adjust via /map/mapcnt parameter.
Tune the maps
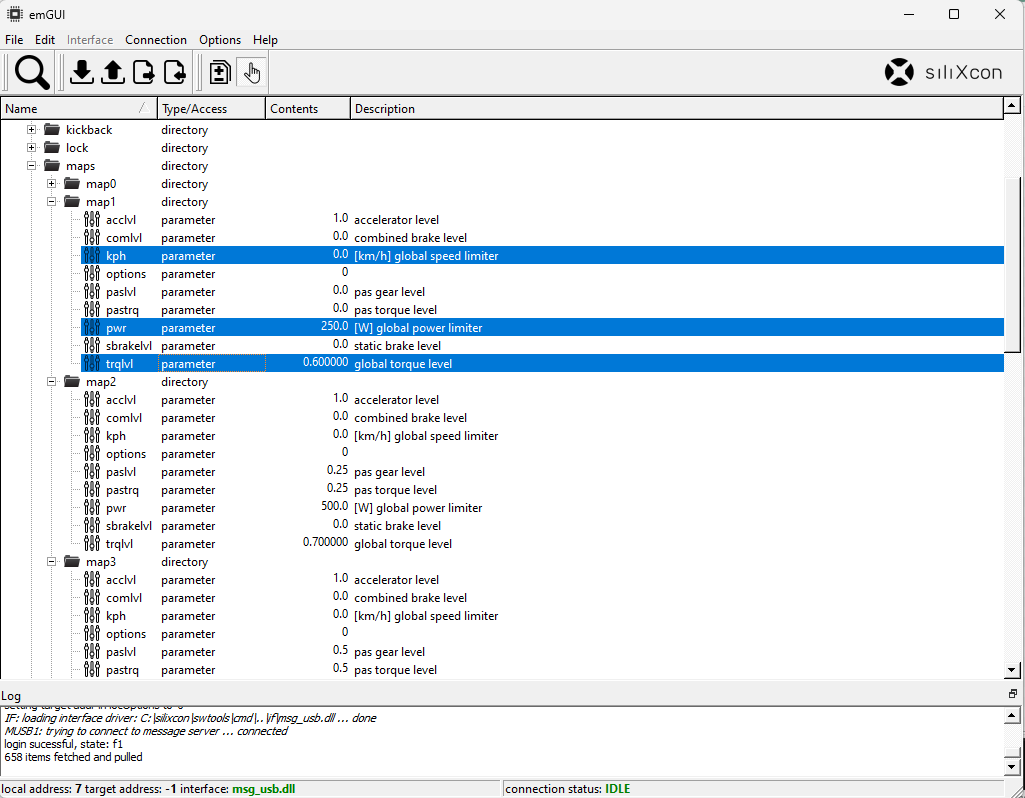
For each map, you can set several parameters. For now, let's focus only on the following:
trqlvl- maximum torque in range [0-1]. It multiplies reference currentiref. i.e. value 0.8 means, that the maximum available current is 80% of theiref.kph- maximum speed in [km/h]. This is the speed of the vehicle. It is calculated from the motor speed. If it's set to 0, there is no speed limitation.pwr- maximum power in [W]. This is the maximum power of the motor. It is calculated from the motor power. If it's set to 0, there is no power limitation.
Parameters located in /maps/mapX (X = map number) Default settings are conservative - adjustment typically needed for higher performance.