OPHION
Ophion is a public application available for all siliXcon motor controllers.
Highlights
- Ophion is a versatile, lightweight, user-friendly, standalone application developed for electric motor drives.
- The software is suitable for various applications, from basic pump controls to sophisticated position servo drives.
- With its built-in control modes covering multiple operational scenarios, Ophion enables rapid system deployment.
- The application maximizes its capabilities by utilizing all available motor control modes, offering enhanced performance and flexibility.
In this documentation, we will explore OPHION systematically, starting with inputs and concluding with motor commands (outputs).
Choosing inputs
Although selecting inputs logically precedes the sig_path block, we recommend first understanding the sig_path block before determining the appropriate inputs.
Essentially, OPHION's sole function is converting inputs into motor commands (acceleration, brake, speed, torque, ...).
OPHION processes up to two analog inputs and two digital inputs. The analog inputs are labeled level1 and level2, while the digital inputs are IN1 and IN2. Users map these internal input variables to physical inputs. For mapping instructions, refer to our inputs docs.
Once our inputs are selected and mapped to the variables, we can proceed to sig_path.
Choosing, setting and understanding signal path
After configuring inputs, we can focus on converting them into outputs. These outputs are level and disarm. level is a float variable ranging from -1 to 1, where -1 represents maximum reverse command, and 1 maximum forward command. This value is fed as a drive command. disarm is a boolean variable (values: true or false) that determines whether the motor should be disarmed or armed. If disarm is true, the motor won't operate even if level is non-zero.
To maintain simplicity, OPHION provides 7 predefined methods for parsing the 4 inputs into outputs (level + disarm). Most methods don't utilize all 4 inputs. For example, when sig_path is set to 1, the controller only considers one analog input1 and directly converts it to motor command, while other settings may include disarming/arming functionality.
For detailed information about setting sig_path and its different modes, refer to our sig_path docs.
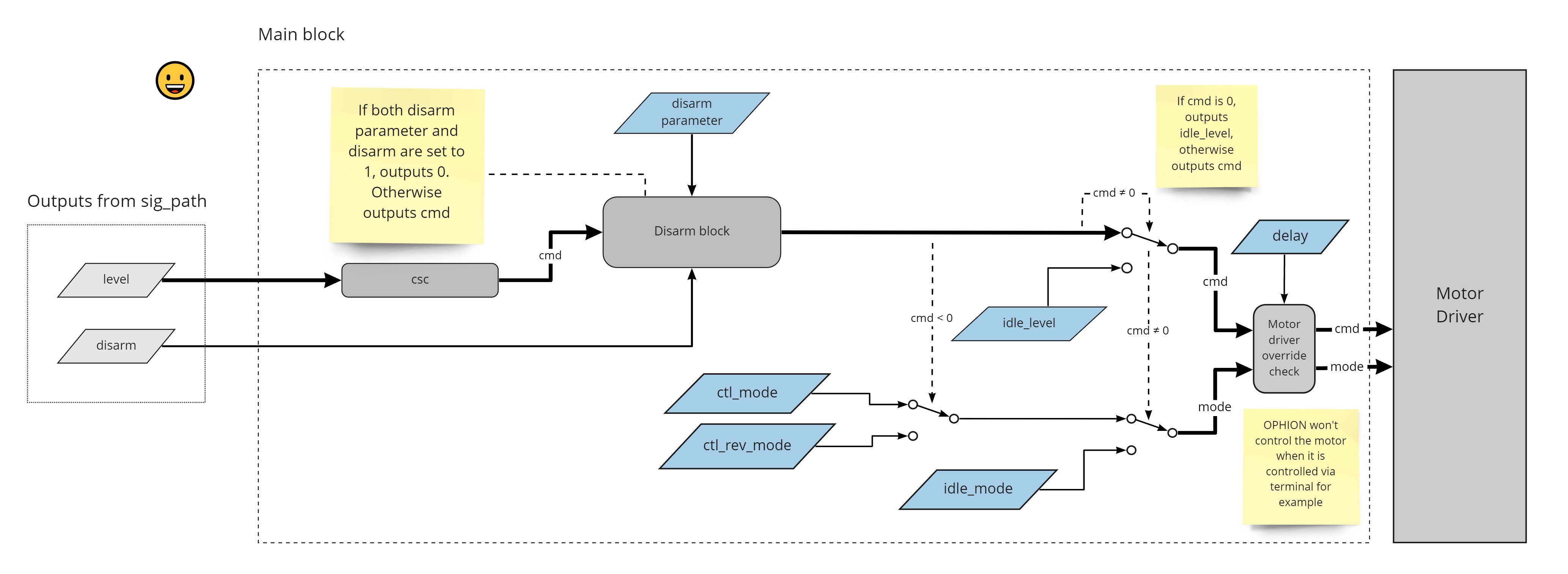
Main block
The main block primarily handles input propagation, driving mode selection, and safety feature implementation. It also offers optional idle mode and cmd features, detailed in a separate file. This section of the application remains consistent, unlike sig_path. Most parameters (except sig_path) are processed here.
For a complete description of all parameters and detailed explanation of the main block, visit our main block docs. OPHION's functionality concludes with sending commands to the motor.
Understanding cmd and mode
These two values provide complete control over the electric motor. cmd is a floating-point value from -1 to 1 representing the factor of maximum value in the given mode. For instance, when running the motor in current mode with cmd set to 0.4, it will operate at 40% of maximum possible current.
mode specifies how you want to control the motor. While cmd interpretation varies across modes, the underlying principle remains consistent. For information about all available modes, refer to driver modes documentation.