Flux control
In the case of PMSM, the purpose of flux control is the alteration of the flux linkage of the permanent magnets in order to extend the operating modes. In the case of SynRM or an ACIM, the flux generation is essential as there are no permanent magnets.
Advancing (BLDC)
The advancing angle is a simpler alternative to the D-axis control, provided by the BLDC motor control algorithm. Please check the motor sensor configuration for BLDC algorithm for direct advancing angle control.
- The further described variables are located in the folder
/driver/.
Parameters (optional)
aac [0-30]
Enables the advancing control mode. If nonzero, the parameter defines the maximum advancing angle in degrees forced voltage command crosses 1 - aacpart.
aacpart [0-1]
Defines the upper portion (range) of the voltage command that should be mapped to the advancing angle, instead of to the duty cycle.
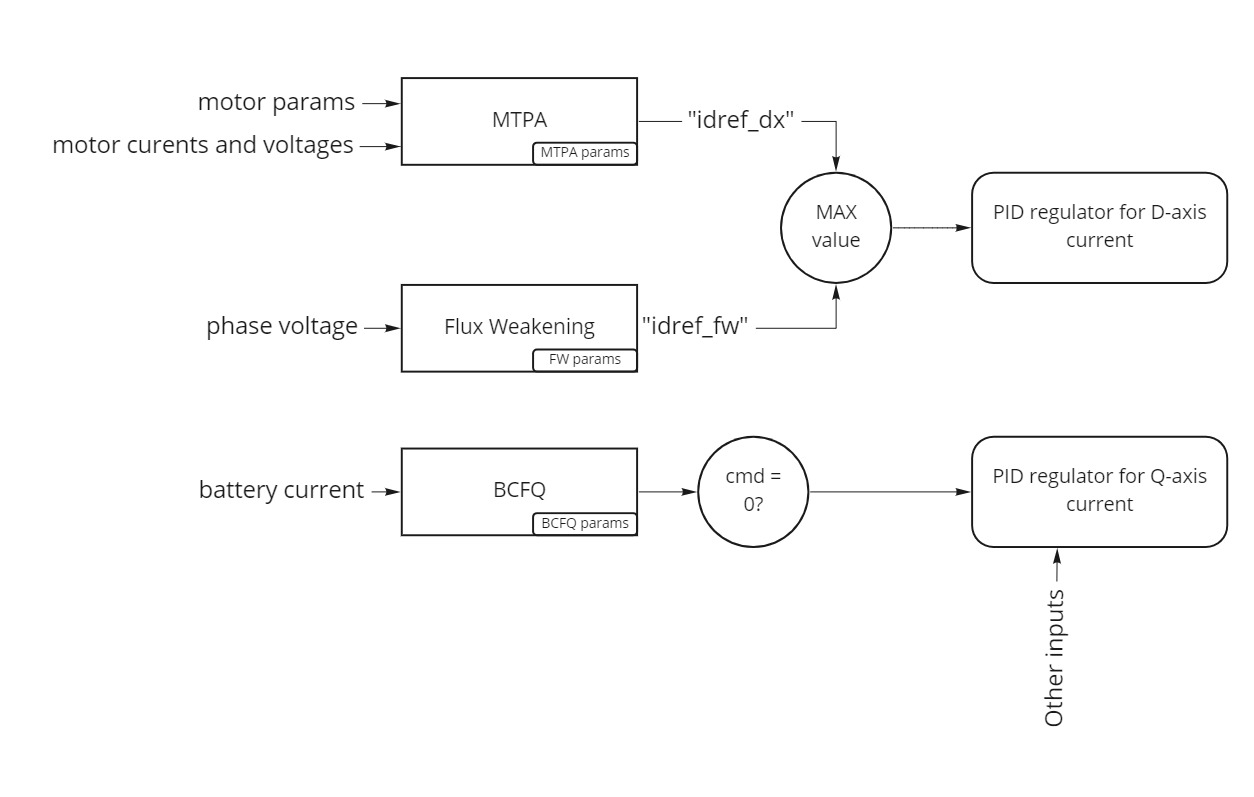
D-axis control (VECTOR)
This section covers the flux(D)-axis control operation for the VECTOR motor control algorithm.
- The following variables are located in the
/driver/dacfolder. - The rest is related to the VECTOR algorithm only.