Flux control
In the case of PMSM, the purpose of flux control is the alteration of the flux linkage of the permanent magnets in order to extend the operating modes. In the case of SynRM or an ACIM, the flux generation is essential as there are no permanent magnets.
Advancing (BLDC)
The advancing angle is a simpler alternative to the D-axis control, provided by the BLDC motor control algorithm. Please check the motor sensor configuration for BLDC algorithm for direct advancing angle control.
- The further described variables are located in the folder
/driver/.
Parameters (optional)
aac [0-30]
Enables the advancing control mode. If nonzero, the parameter defines the maximum advancing angle in degrees forced voltage command crosses 1 - aacpart.
aacpart [0-1]
Defines the upper portion (range) of the voltage command that should be mapped to the advancing angle, instead of to the duty cycle.
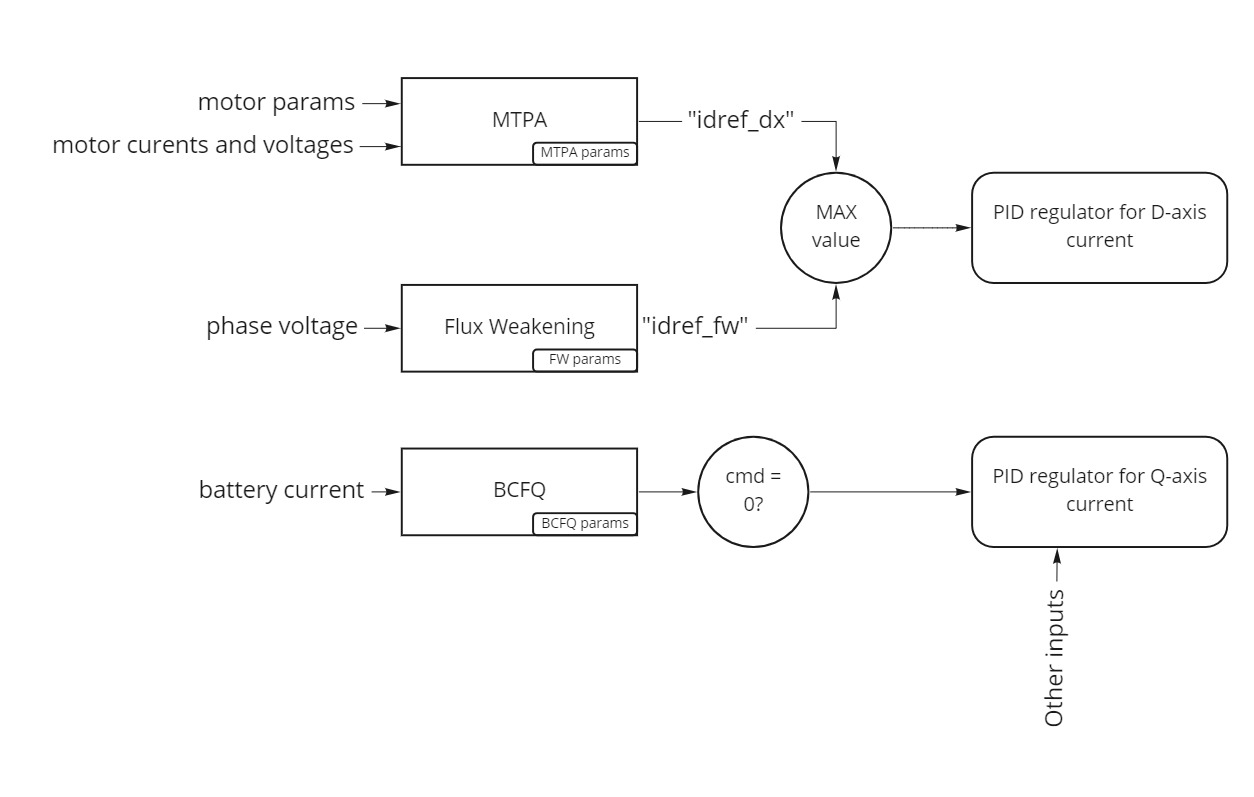
D-axis control (VECTOR)
This section covers the flux(D)-axis control operation for the VECTOR motor control algorithm. Both flux weakening and MTPA are computed adaptively from a compact real-time motor model rather than from precomputed lookup tables or flux maps. This keeps the parameter set small and lets the controller track the operating point automatically. If a table-based characterization is required for a particular motor, it is available on demand — please contact siliXcon.
- The following variables are located in the
/driver/dacfolder. - The rest is related to the VECTOR algorithm only.
The combined magnitude of the d-axis and the torque-producing q-axis current is held within the total stator current budget defined by iref. Any d-axis allocation — whether from dxc, fwc, or the MTPA mechanism — therefore reduces the current that remains available for the torque axis, and it does so increasingly fast as the total approaches iref. An overly aggressive d-axis demand can leave almost no torque-axis headroom and worsen stability, so start conservatively and increase only as needed.
For the step-by-step procedure of tuning these mechanisms on a real IPM motor (recommended order, baseline values, and safety precautions), see the Driving an IPM motor guide. The pages in this folder describe the underlying mechanisms.