Flux weakening
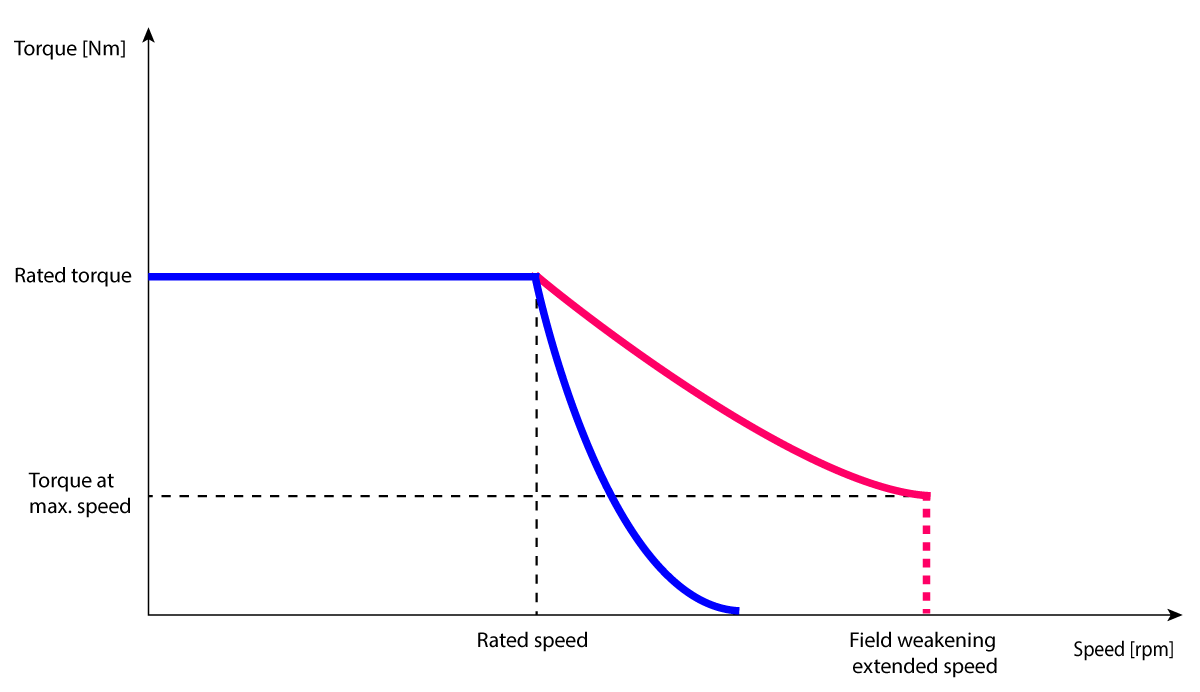
This subsystem uses d-axis current control to deliver adaptive flux weakening (extending the motor speed range under the same DC-side voltage, for the sake of the torque). Using an integrative feedback, the Back-EMF is kept within a specified range (fwm to fwr). The dynamic sensitivity can be adjusted with fwd. The following picture illustrates the typical enhancement achievable with a common SPM machine. Note that in an IPM, further extension is usually achievable due to reluctance torque use.
- The following variables are located in the
/driver/dacfolder. - This page is related to the VECTOR algorithm only.
Parameters
fwc [.iref]
The flux weakening current limit <0:disable>.
A mismatch between fwc and dxc is a common cause of a perceived torque step ("kick" or "drop") at the reluctance-to-field-weakening transition. See the IPM tuning guide for the recommended baseline and procedure.
fwm [.uref]
If the
urefparameter is not set, the actual battery voltage is used.
The flux weakening engage margin. If the Q-axis motor voltage rises above the value specified by this parameter, the negative D-axis current reference is increased. Similarly, if the Q-axis motor voltage falls below the value specified by this parameter, the negative D-axis current reference is decreased. The algorithm presumes that, by increasing the negative D-axis current, the Q-axis voltage generated by the motor is decreased and vice versa (by the field weakening effect).
fwr [.uref]
If the
urefparameter is not set, the actual battery voltage is used.
The flux weakening release margin. If the Q-axis motor voltage falls below the value specified by this parameter, the D-axis current reference (related to flux weakening) is reset.
fwr and fwm params operate together in a hysteresis loop. Always have fwr lower than fwm.
If yours motor's back-EMF is not sinusoidal, typically, to improve the behavior, set the fwm lower and increase the difference between the fwr and the fwm.
fwd [-]
The flux weakening integrator gain.
This parameter defines how much (how fast) does the Q-axis voltage change affect the negative D-axis current reference. The higher this parameter is, the faster the response of the field weakening algorithm. The lower this parameter is, the lower risks of oscillations and smoother operation in the field weakening region can be assumed.
If your motor's back-EMF is not perfectly sinusoidal, lower this parameter.
A higher fwd speeds up the onset of field weakening. Increasing it is only meaningful when higher dynamics with respect to speed are required (for example, when a clutch and a flywheel are present in the drivetrain). A motor in firm contact with the load usually does not need this adjustment.
States (only esc5)
idref_fw [A]
The calculated d-axis field weakening current reference.