D-axis excitation
This subsystem enables d-axis current control for other-than flux weakening purposes. Specifically, MTPA (Maximum Torque Per Ampere) is implemented.
- The following variables are located in the
/driver/dacfolder. - This page is related to the VECTOR algorithm only.
The MTPA, using the motor parameters, is trying to find the best value of the D-axis current to maximize the shaft torque for the given total stator current. This algorithm is suited usually for the IPM motors. The algorithm has to work with many constraints depicted below:
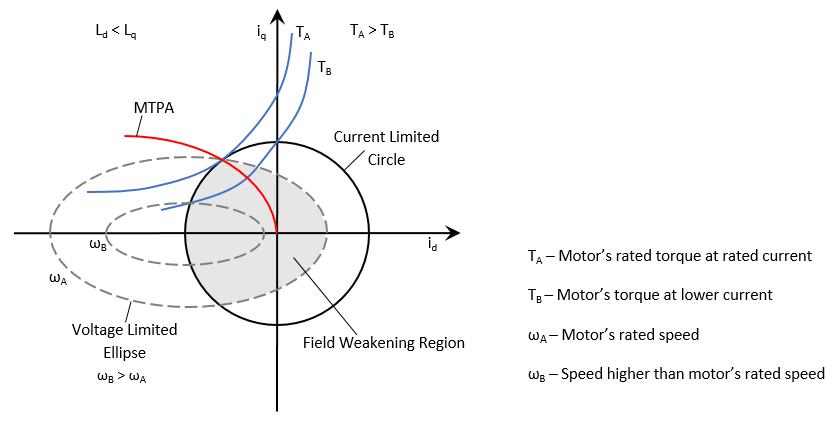
The optimal d-axis current depends on the difference between the d- and q-axis inductances. In a real motor this difference is not constant: it shrinks as the stator current rises (magnetic saturation), and the magnet flux also changes slightly with temperature. The controller compensates for the inductance drop using the non-linear motor model parameters Da and Dc. When these do not match reality, the resulting magnetizing current is sub-optimal, which is perceived as a variation of torque versus speed. The MTPA curve can therefore be shaped by adjusting Da, Dc, and mtk.
For the practical procedure of using these parameters to smooth a torque step around the high-speed transition on a real IPM motor, see the Driving an IPM motor guide.
Parameters
dxc [.iref]
This parameter limits the maximum d-axis current for the other-than flux weakening purposes <0:disable>
Previously, this parameter was named
mtpa.
mtk [-]
The MTPA feedback gain. The higher the value, the faster is the MTPA algorithm convergence. The lower the value, the smoother the response and lower the risks of oscillations. <0:direct map>
Together with the motor model parameters Da and Dc, this gain is one of the levers used to shape the MTPA curve.
Special value: 0 - disables the MTPA algorithm and forces
dxc*irefcurrent as the D-axis current reference.
(ESCx 5.0 and above) If the mtk value has a negative sign, the algorithm uses Q-current reference rather than actual measurement. This may yield into faster dynamics, but will work only in current control modes and may be problematic within saturation. Please contact siliXcon for further advice.
States (only esc5)
idref_dx [A]
The calculated d-axis excitation current reference.