SWTools
is an essential, modular set of software tools for manipulating siliXcon devices and integrating them into your application.
info
The single software package is compatible with all our devices.
tip
Who is this software for:
- System integrators (those who integrate siliXcon devices into a product)
- Solution developers (those who are designing a product from ground-up with siliXcon platform)
- Researchers (motor developers, control algorithm evaluators)
- Enthusiasts (anyone with R&D spirit and curiosity-driven mindset)
- SiliXcon staff
Who is this software not for:
- End users
Example of a typical hardware setup:
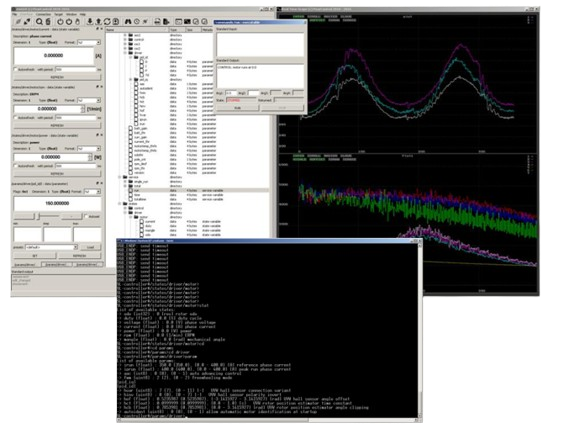
Examples of what can you do with SWTools and a siliXcon device:
- Set up a communication interface to establish a connection
- configure parameters
- observe state variables
- execute commands and see results
- read logs and permanents
- perform verbose diagnostics
- save and load configuration to/from a file
- write and run scripts
- measure system performance
- View and log real-time process data
- write a custom End-of-Line configurator for your product
- create a GUI for your application
- upgrade or downgrade the firmware
- identify system parameters automatically
- connect to multiple devices simultaneously
- tune your application in-the-loop
- perform independent feature evaluation of your product
- make a remote session with siliXcon CC support
- ... and much more ...